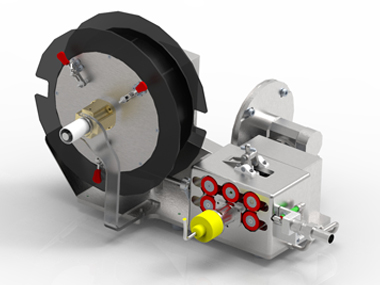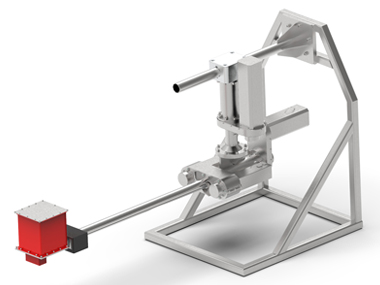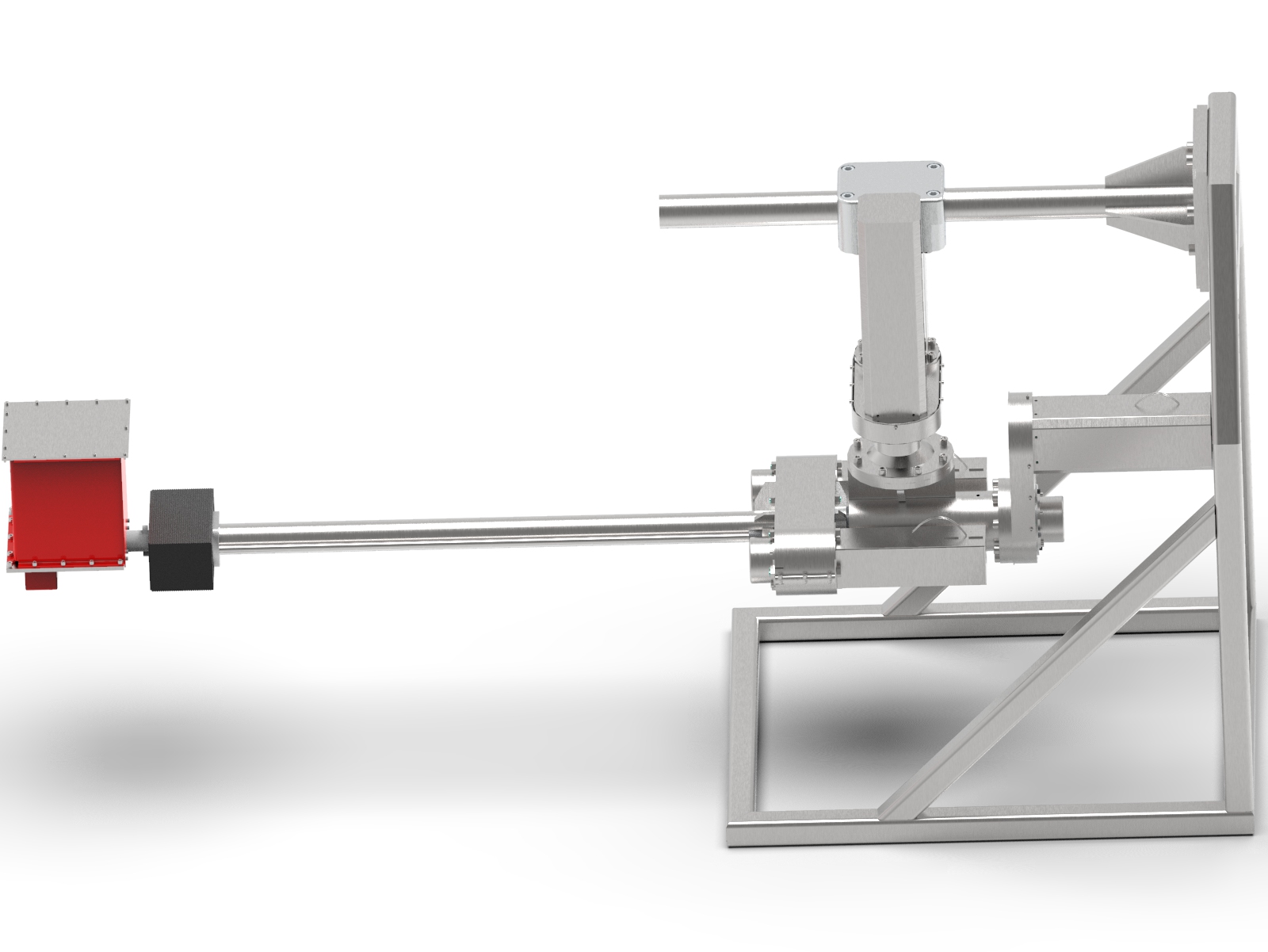
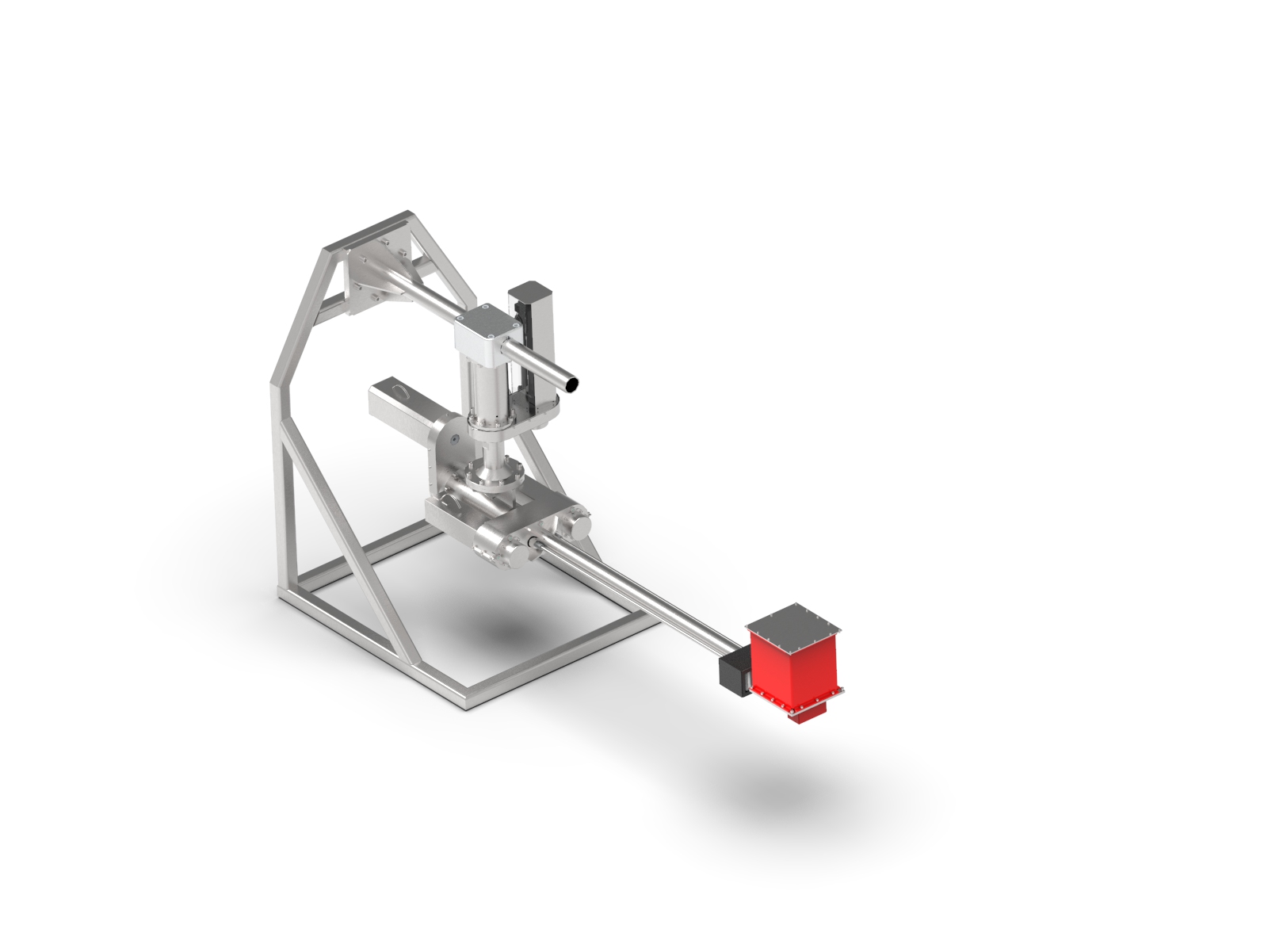
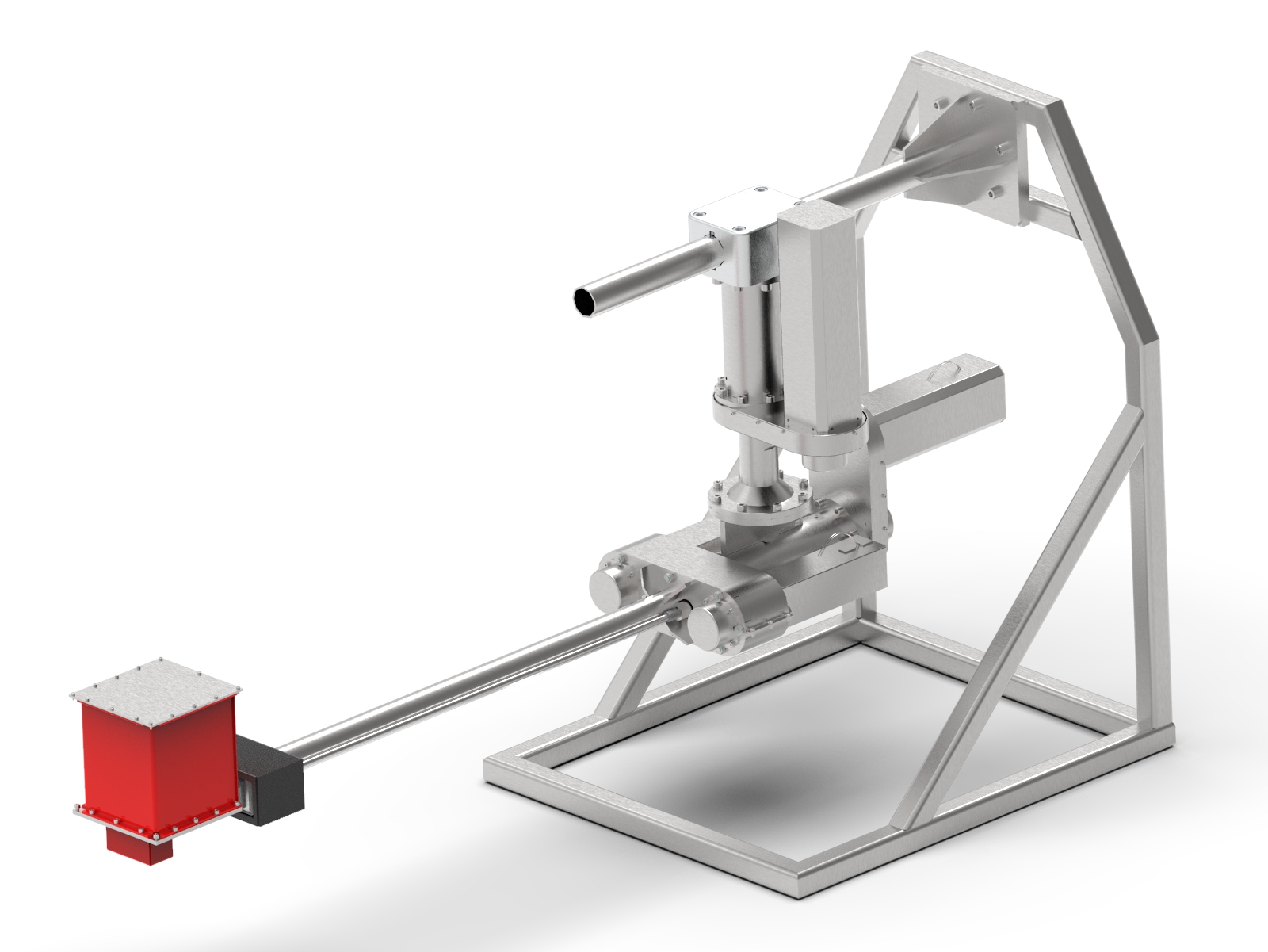
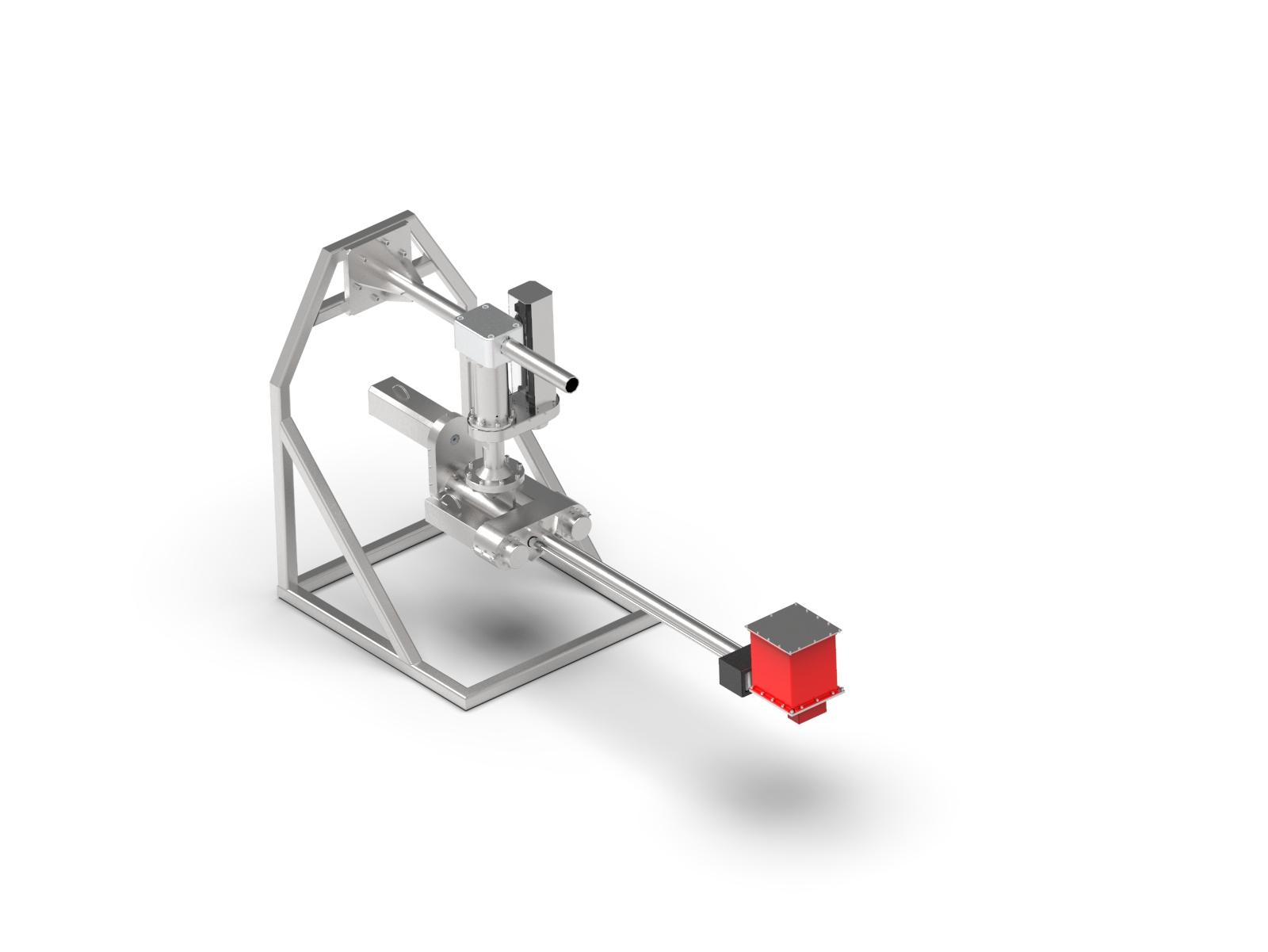
4 Axis Robot
The 4 – Axis robot will be used for outdoor applications at high altitudes.
Salient points of the Robot:
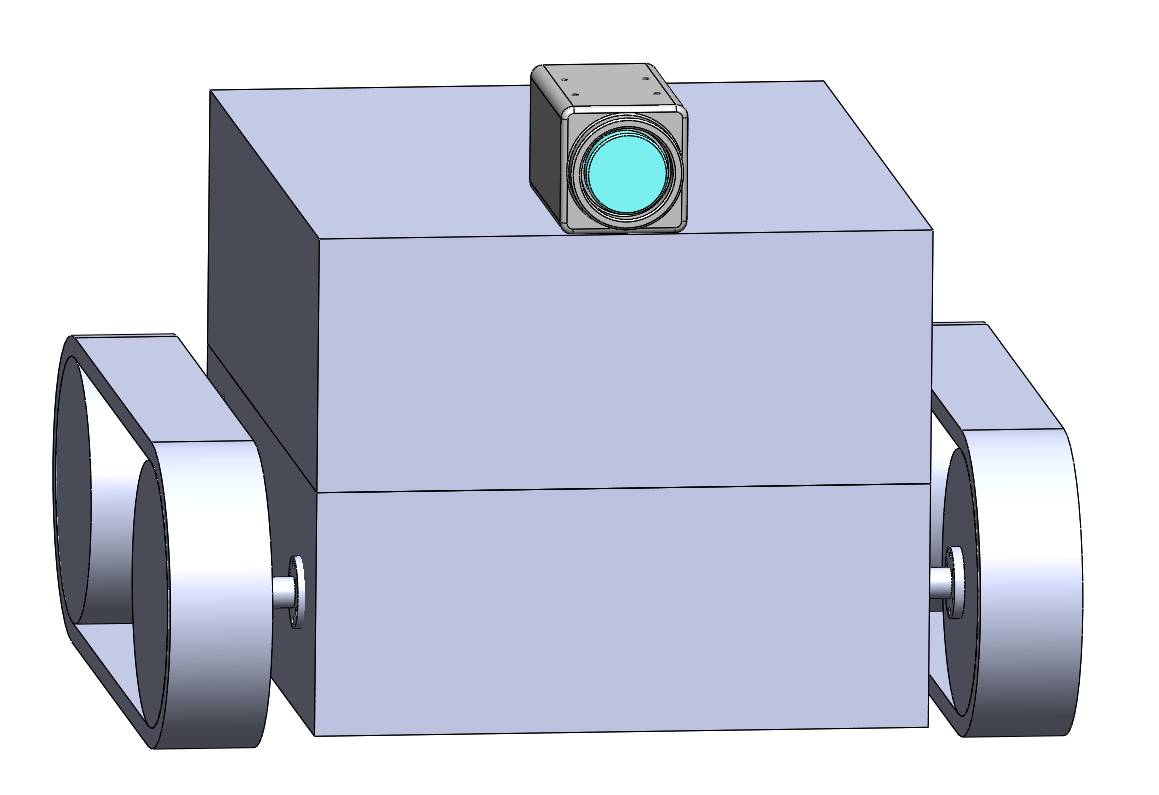
The 4- axis are termed as Base rotation, Arm rotation, Wrist elevation and Wrist roll.Robot has two positions: i) Parking and ii) Camera. The position of the robot shown in the drawing is Camera position. At Parking position, robot arm is parallel to boom tube. All the movements of the robot are controlled by the operator remotely from HMI panel. A camera along with lens shall be fixed to the wrist joint at the actual site.
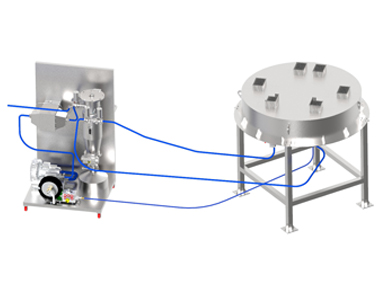
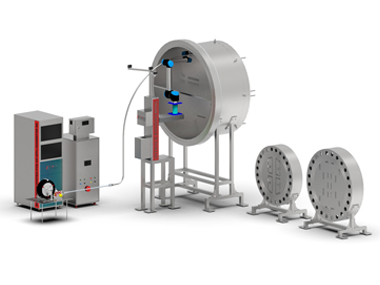
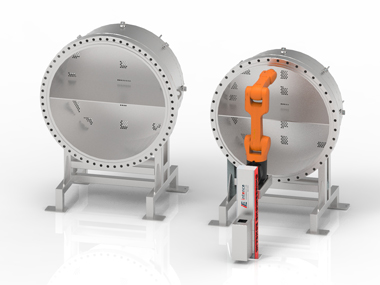
Related Products