The crawler robot is required for carrying out remote inspection of large inaccessible surfaces. It can be
used for inspection of smooth metallic surfaces composed of steel, acrylic, polymers, etc. Track based
locomotion is used to achieve good gripping and it can be remotely operated from operator end using
GUI console. The adhesion on wall surface can be achieved by using suction force and both active as well
as passive means can be offered depending on user requirements. We offer microcontroller or PLC
based embedded system for robot control which can be remotely controlled using tether or wireless
operation. Following are the standard specifications which are fully customizable on per user
requirements.
Standard Specifications:
| Robot Speed | 300mm/sec |
| Locomotion Drives | Geared BLDC drives |
| Robot locomotion | Wheels (or) Toothed tracks |
| Communication | Wired & wireless options available |
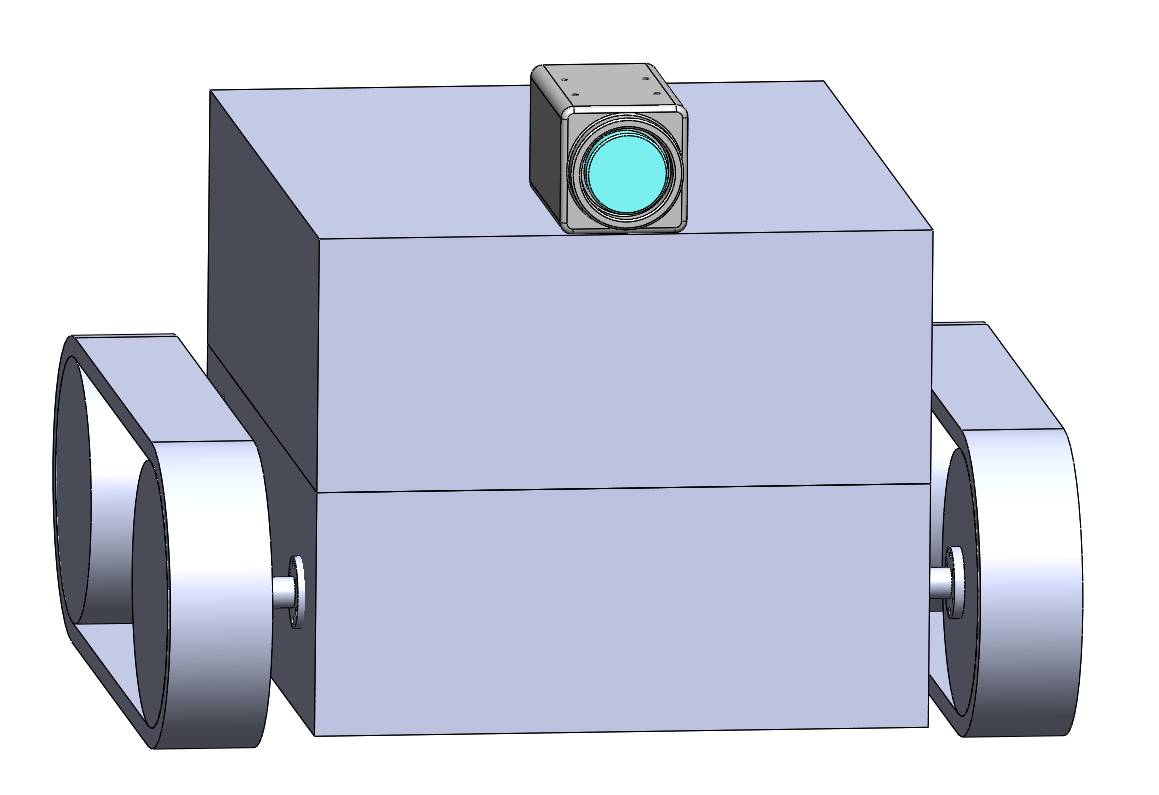
| Remote Viewing | Onboard pan-tilt network camera with night vision |
| Size | 400 x 400 x 400mm & weight < 15 kg |
| Material of construction | Carbon fibre, Polymer alloys |
| Controller | PLC or PC104 based microcontroller stack |
| Suction arrangement | Suction cup arrangement powered using active and/or passive means |
| Robot Power |
|
| Operator interface | PC or laptop based GUI, joystick |
Related Products